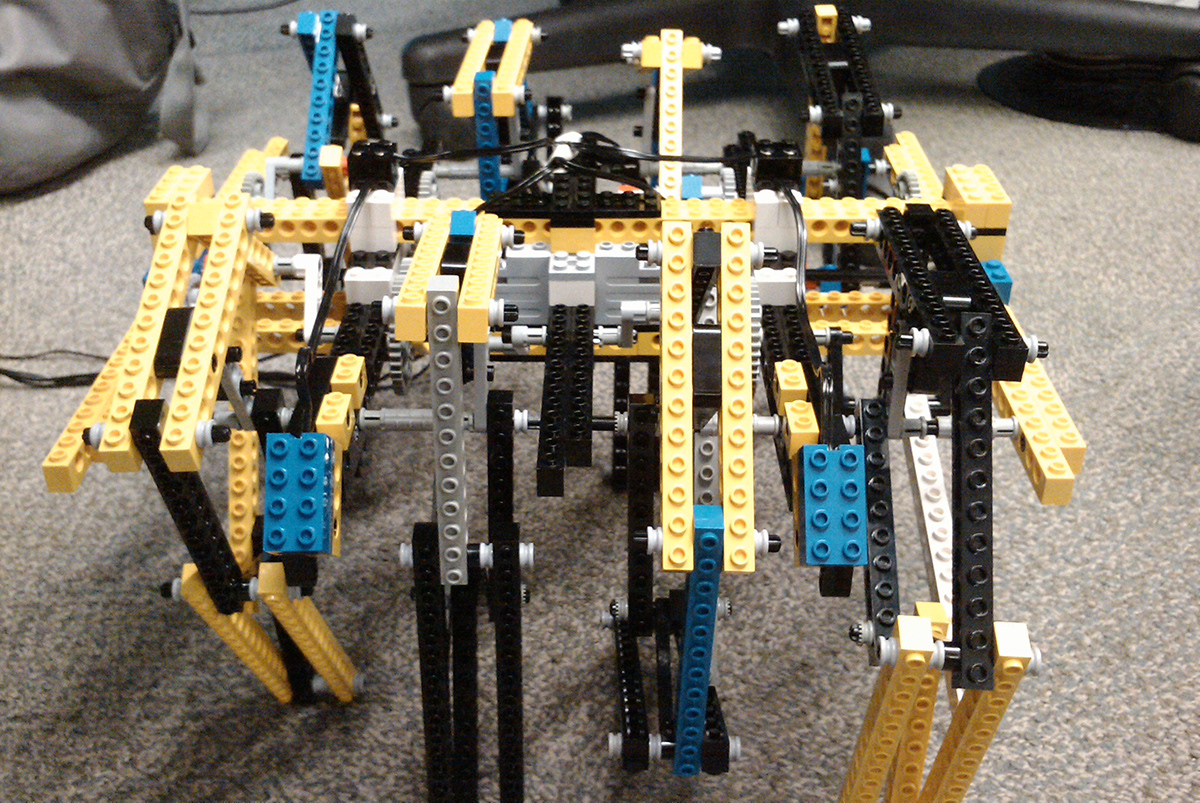
This was a design project for one of my Electrical Engineering courses. We used Assembly code on an Altera DE2 board hooked up to a custom U of T built Lego controller to control the Walker's motors, light sensors, controller inputs, and automation.
The Jansen Walker could run without user input, using its light sensors to detect when an object is in its path, and change direction when needed. It did have the capability to be controlled from a PS2 keyboard attached to the FPGA. We had two Lego motors attached to the middle of the body, which controlled the direction of four legs on each side of the machine. Changing directions meant reversing the direction of one of the motors.
Video credit: Reagan Sun
Pictures

My partner, Joel, and me, holding up the Lego Jansen Walker. Joel was responsible for the coding that made this project possible.






"Muhahahaha." - Perfect capturing of lense flare caught from the light sensors on the Walker.